「自動運転バス」がミライの街を支える!?
高齢者の自主的な免許返納を求める動きや路線バスの運転士不足などから、高齢化や人口が減少している地域では、移動の足を確保することが重要な課題です。
「自動運転バス」の普及を見込んで、2020年「自動運転バス」の実証実験がさまざまな場所で行われています。
今回は、まず自動運転とは何かを具体的に見ていくと共に、今各地で行われている「自動運転バス」の実証実験内容や運用することで社会がどのように変わっていくのかを考察します。
目次
「自動運転」の現状
「自動運転」6段階のレベル
アメリカや中国など諸外国で自動運転の実用化が始まる中、日本でも技術開発の高度化とともに法整備が進み、2020年4月、自動運転レベル3(条件付き運転自動化)が解禁されました。
これは“ある条件下”ではドライバーがシステムや周辺状況を監視する義務から開放されるもので画期的なことです。
自動運転は、技術水準を元に、レベル0から5までの6段階にレベル分けされています。
基準として、自動車関連の標準規格の開発などを手掛ける米国の非営利団体「SAE(米国自動車技術会/Society of Automotive Engineers)」が2014年1月に発表した6段階のレベル定義が日本をはじめ各国で広く採用されています。
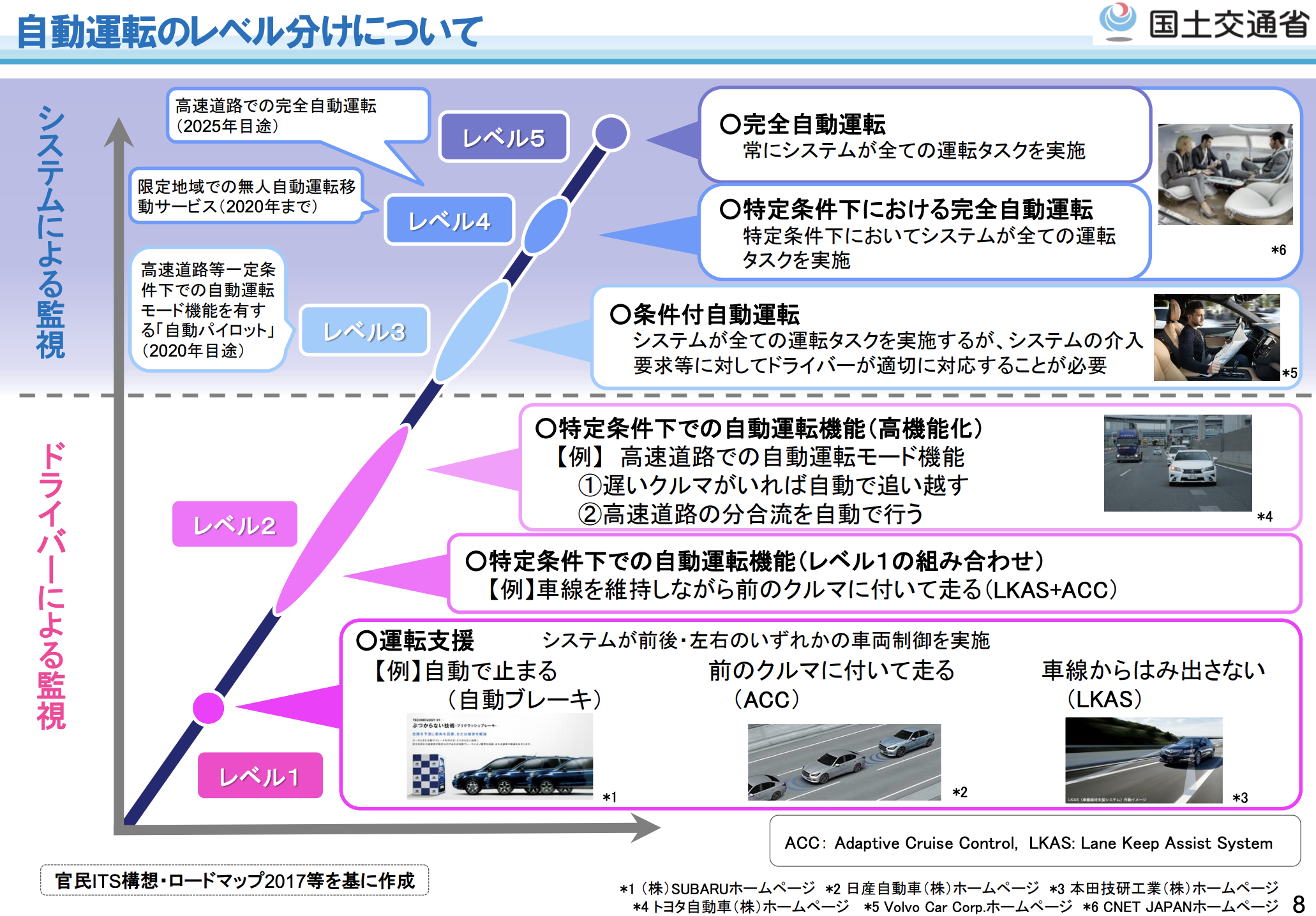
レベル0は「運転者が全ての動的運転タスクを実行するもの」と定義されていて、システムの搭載はなく、運転者が全ての動作を行うことを意味しています。
レベル1は、アクセルやブレーキといった車両の前後方向の制御か、ハンドルを使った横方向の制御のいずれか1つをシステムが担うというもの。運転の責任はドライバーにあり、システム任せの運転は認められません。常に車両の走行状況を監視していなければなりません。
レベル2は、縦方向と横方向、両方の制御を担いますが、レベル1同様、運転の責任はドライバーにあり、ドライバーは常に車両の走行状況などを監視していなければなりません。
レベル3は、自動車専用道路上における一定速度域など、一定の条件下においてアクセルやブレーキによる縦方向の制御とハンドル操作による横方向の制御をシステムが担います。その間の運転主体はシステムとなり、ドライバーは運転操作から解放されます。
日本では、このレベル3が解禁となりました。
ただし、何らかの理由でシステムが自動運転を維持できないと判断し、ドライバーに運転交代の要請を行った場合、ドライバーは直ちに運転操作を代わらなければなりません。
レベル4は、速度や道路環境、走行区域、気象条件など限定される条件はありますが、一定の条件下においてドライバーを必要としない完全自動運転を実現します。
何らかの理由でシステムが自動運転を維持できなくなった場合、安全な方法で路肩に停止したり、可能な場合はドライバーによる手動運転に切り替える機能も求められます。試行的ですが、すでに自動運転タクシーなどが実現しています。
レベル5は、原則、どのような場所、どのようなときでもドライバーを必要としない完全自動運転です。
あらゆる不測の事態に対応できる認知・判断技術といった非常に高度なシステムを要するため、事実上実現不可能とみる専門家も少なくありませんが、自動運転開発の最終到達地点は現状このレベル5となります。
日本の実現目標
「世界一のITS(Intelligent Transport Systems:高度道路交通システム)を構築・維持し、日本・世界に貢献する」ことを目標に、内閣府が毎年改定している自動運転実現に向けた指針「官民ITS構想・ロードマップ」の最新版(2020)によると、自家用車についてはレベル2の市場化について期待時期を2020年までとするほか、高速道路におけるレベル3の市場化を2020年、レベル4の市場化を2025年として、政府は民間企業による市場化が可能となるよう目標時期を設定しています。
物流サービスでは、レベル2以上の高速道路でのトラックの後続車有人隊列走行を2021年まで、後続車無人隊列走行の市場化を2022年以降、そしてレベル4の高速道路におけるトラックの完全自動運転については、2025年以降の市場化を目指す方針です。
移動サービスでは、レベル4の技術による限定地域での無人自動運転移動サービスをセーフティドライバーが乗車する形で2020年中にも実現させる見込みです。セーフティードライバーのいない完全遠隔制御による移動サービスは2022年の実現を目指しています。
また、レベル2以上の高速道路でのバスの自動運転についても、2022年以降の市場化を目指すとしています。
これらの実現に向け、官民一体となり、実証実験や自動運転を活用した移動・物流サービスの実証などを進めている状況です。
世界の取り組み
日本に先駆けて、世界の国々でも実用化に向けて準備が進められています。
アメリカでは、グーグル系Waymo(ウェイモ)が完全無人ではないもののレベル4の自動運転タクシーを2018年12月に実用化済みです。しかし、「国」としての統一した法整備はまだ進んでいないのが状況です。
フランスでは、早ければ2020年にも自動運転車の公道走行を解禁する方針で、法制度の整備を急いでいます。
イギリスでは、政府が2021年までに自動運転車が公道を走れるようにすると発表していて、30年以内に、自動運転車以外は公道の走行を禁止する可能性についても言及しています。
中国では、北京や上海、深圳(しんせん)など大都市を中心に自動運転の実証環境が整い、各社が自動運転タクシーの実用化に向けた取り組みを急加速させていて、エリアごとに社会実装が浸透していく可能性が高そうです。
2020年各地で進む「自動運転バス」の実証実験
国内初!茨城県堺町「自動運転バス」の定常運行が開始
茨城県境町で、国内で初めて「自動運転バス」の定常運行が2020年11月26日から始まりました。
この事業は今年1月に発表されたもので、境町が自動運転事業の運行管理を推進するボードリー(BOLDLY、旧SBドライブ)と、輸入商社マクニカの協力を受けて実現しました。
自動運転バスはフランスのNavya社製『ナビヤ・アルマ』で、境町では3台購入し、運行管理やそれに伴う人件費も含めて、5年間で5億2000万円の予算を計上しました。
境町はこれまで人口減少や高齢化に伴う活力の低下、交通網の脆弱性などの構造的な課題を抱えていましたが、圏央道を活用した公共交通網の整備や拠点整備を積極的に推進した結果、人口減少に歯止めがかかりつつあるとしています。
境町としてはナビヤ・アルマの導入が、これらの拠点を中心とした町内の回遊性の向上と、さらなる人口の増加、ひいては地域活性化を促進することにつながると期待しています。
また、ナビヤ・アルマは国土交通省が推進するグリーンスローモビリティに該当するものとしても注目されています。
ナビヤ・アルマが運行するルートは「境シンパシーホールNA・KA・MA(境町勤労青少年ホーム)」と、境町の地域活性化の活動拠点である「河岸の駅さかい」の往復約 5kmを最高18km/hで走行。運行時間は平日の午前10時から午後3時30分まで8便を予定していて、運賃は無料です。
バス停は2カ所でのスタートですが、住民の要望に合わせて今後はバス停を増やし、合わせてルートや便数も拡大していく方針だということです。
ゆっくりなスピードではありますが、無料で乗車できるとのことで、今後住民の足となることが期待されています。
伊豆高原駅「自動運転モビリティ」を遠隔で操縦
静岡県伊東市にある伊豆高原駅周辺で、遠隔型の自動運転モビリティの実証実験が、2020年12月17日から25日まで行われる予定です。
この実証実験は、東急株式会社と国立大学法人東海国立大学機構名古屋大学、株式会社ソリトンシステムズなどが協力して行うもので、小型バスタイプの電気自動車「Izukoいずきゅん号」を遠隔で監視・操縦して検証するものです。

伊豆高原駅周辺は、観光名所が数多く点在していますが、急な坂が多く、観光客の利便性において以前から課題を抱えていました。
実証実験では、スマートフォンMaaSサービス「Izuko」や伊豆高原駅に設置されているテレビから、自動運転システムを搭載した小型バスタイプの電気自動車「Izukoいずきゅん号」を需要に応じて呼び出すオンデマンド方式で運行し、安全性などサービスの実用化に向けた課題の検証を行います。
名古屋大学は自動運転車両の公道での走行性、停止性などの走行に関連する事象を検証、東急株式会社は自動運転車両が走行中に道路条件により停止した場合など、遠隔コントロールセンターからの遠隔監視・操縦のオペレーションを中心に検証します。

この実証実験では、将来的に一人のオペレーターが複数台の自動運転車両を運行管理する効率的な移動サービスの構築を目指していて、伊豆高原駅付近に複数台の自動運転車両を監視・操縦可能な遠隔コントロールセンターを設置し、運行する車両の遠隔監視・操縦と、静岡県主催の自動運転実証実験プロジェクトにおいて、下田市で運行する自動運転車両の遠隔監視も行います。
従来、4G(LTE)の通信インフラを使用したリアルタイムの監視・操縦は、通信遅延などの問題により難しいと考えられていましたが、低遅延の伝送技術の開発により実現しました。
また、1カ所の遠隔コントロールセンターから、複数都市の車両を同時に遠隔監視することは日本初となります。
伊豆半島をはじめとした地域内の移動手段として、今後活躍することが期待されています。
「自動運転バス」はミライに欠かせない乗り物
自動運転バスの普及が進めば、バス会社が抱えている高齢化などによる運転士不足や運用にかかるコストの問題が解決されることでしょう。
短距離、中距離、長距離移動のすべてを担うバスは、車体は大きいもの一定の路線を走行するため、自動運転に向いたモビリティです。
実用化は商業施設や空港敷地内など低速走行で安全を確保しやすい公道外で始まり、徐々に限定領域化の路線バスや送迎バスなどに拡大していくと期待されています。
鉄道やタクシー、シェアサイクルなど他のモビリティとの相性も良く、未来において欠かせない乗り物となることでしょう。
メールマガジンに登録しませんか?
本サイトを運営しております株式会社Will Smartは公共交通・物流・不動産などの社会インフラの領域においてIoT技術やモビリティテックを活用したGX×DXの取り組みに注力しております。
メールマガジンではWill Smartの最新の取り組み事例やミライコラボのコンテンツ情報をなどお届けします。下記の登録フォームよりぜひご登録ください。